HOW to use airspeed sensor
- Upload Plane firmware, airspeed only can be supported for Plane firmware, do not use for Copter or other.
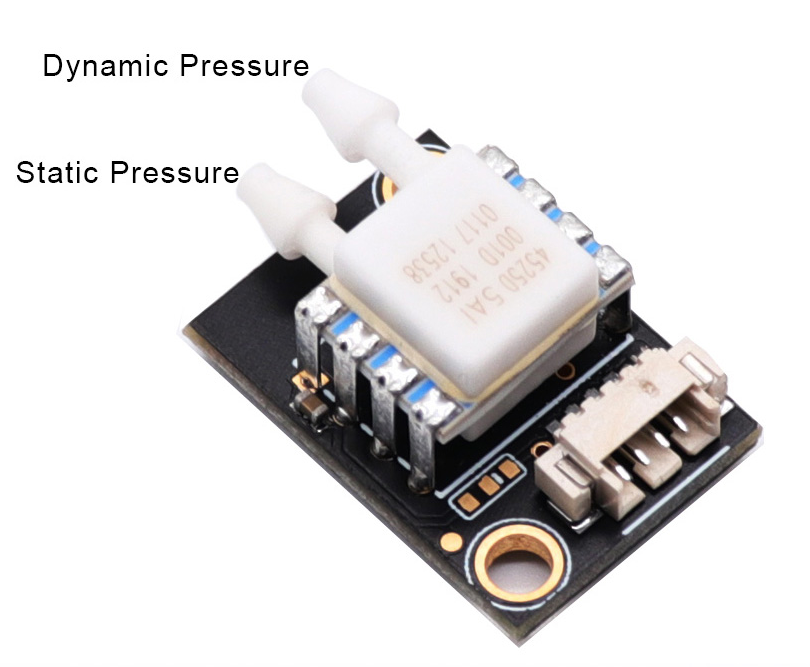
2.Connect Dynamic Pressure and Static Pressure PIN to Tube

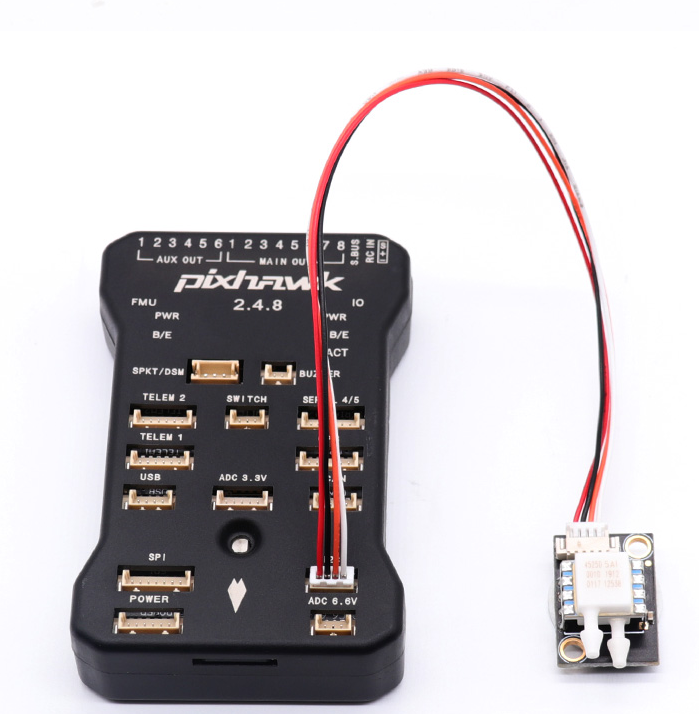
3.Connect your pixhawk to Mission planner to setup .
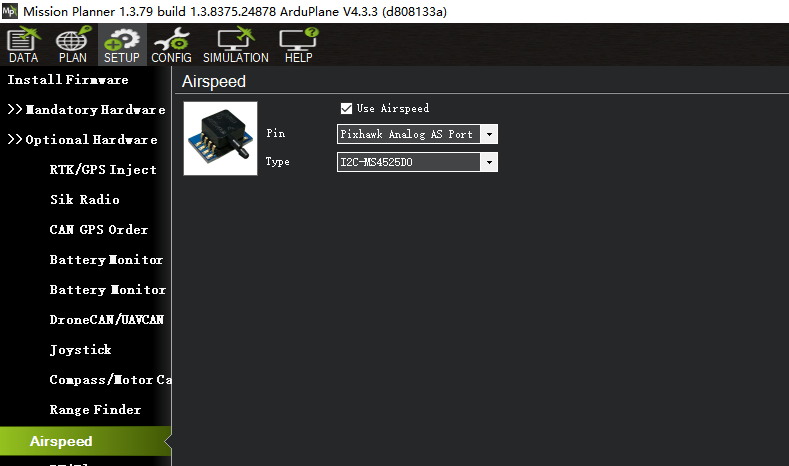
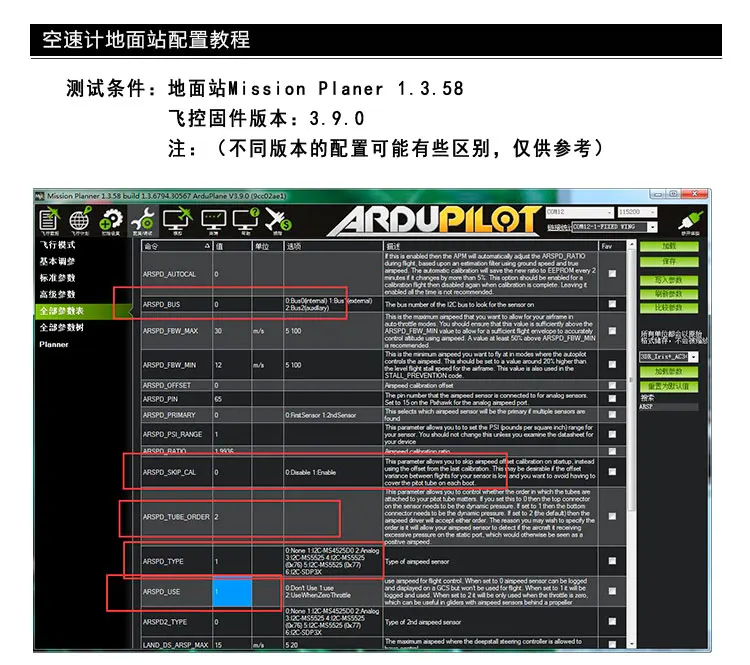
ARSPD_BUS set as 1,use EXTERNAL I2C
ARSPD_SKIP_CAL set as 0, each time restart the flight controller, need to calibrate the airspeed meter offset. Set to 1, automatically skip the airspeed gauge offset calibration, using the last calibrated offset
ARSPD_TUBE_ORDER set as 2,Automatic matching of the upper or lower tube is dynamic pressure
ARSPD_TYPE set as 1, use I2C-MS4525D0
After modify parameter,remember to click “save parameter”button.
After setup ,remember to reboot pixhawk board.
In the ground station debugging interface, observe the change of the airspeed meter. The general value jump is 1-3 in the normal range. Blow air to the airspeed meter. If the airspeed value increases, the airspeed meter works normally.


More calibration introduction:http://plane.ardupilot.com/wiki/calibrating-an-airspeed-sensor/