How to use 6M GPS for PIXHAWK
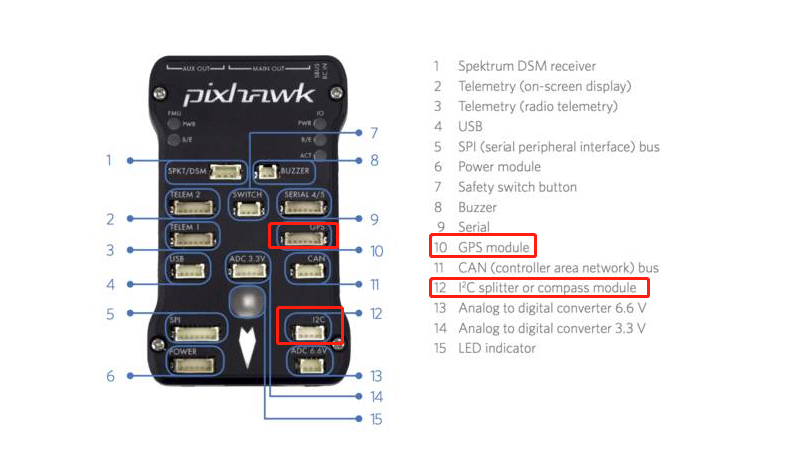
1.How to connect?
2. How to upload firmware ?
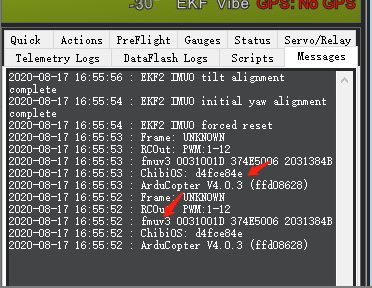
should upload above 3.5 FMUV3 version firmware for PIXHAWK flight controller, below 3.5 or FMUV2 version firmware does not support for compass.So make sure you upload the firmware is above 3.5 version(for example,3.6.11) AND FMUV3version (not FMUV2 version ).For example,
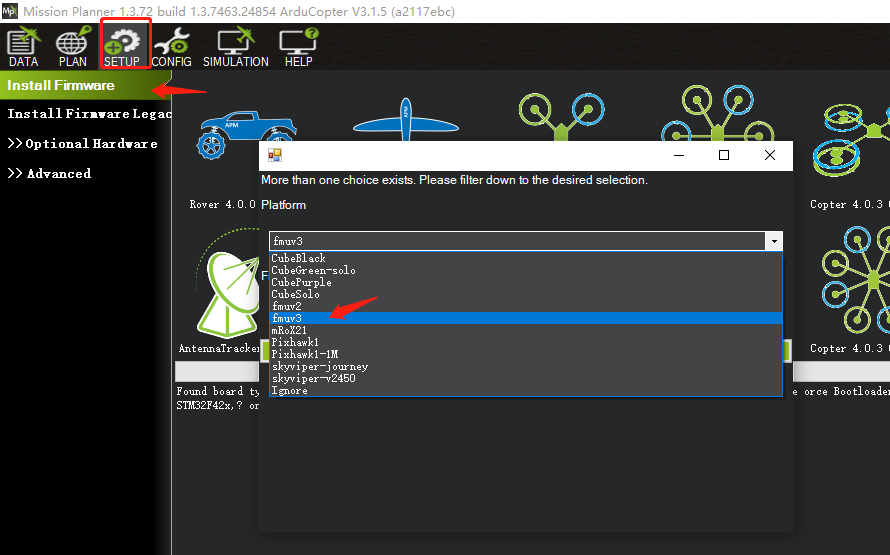
You can upload FMUV3 firmware online from mission planner.
If you do not have firmware,you can download from here,https://firmware.ardupilot.org/ , for example,
Copter: https://firmware.ardupilot.org/Copter/stable4.0.3/fmuv3/arducopter.apj
Plane:https://firmware.ardupilot.org/Plane/stable-4.0.5/fmuv3/arduplane.apj
Rover:https://firmware.ardupilot.org/Rover/latest/fmuv3/ardurover.apj
You can download the latest Mission Planner from here,https://firmware.ap.ardupilot.org/Tools/MissionPlanner/ ,it can download the V3 version firmware automatically.(Note,IF you want to upload firmware,you may be asked “Is this a CubeBalck?”Remember to click “NO”.)
2.How to calibrate?
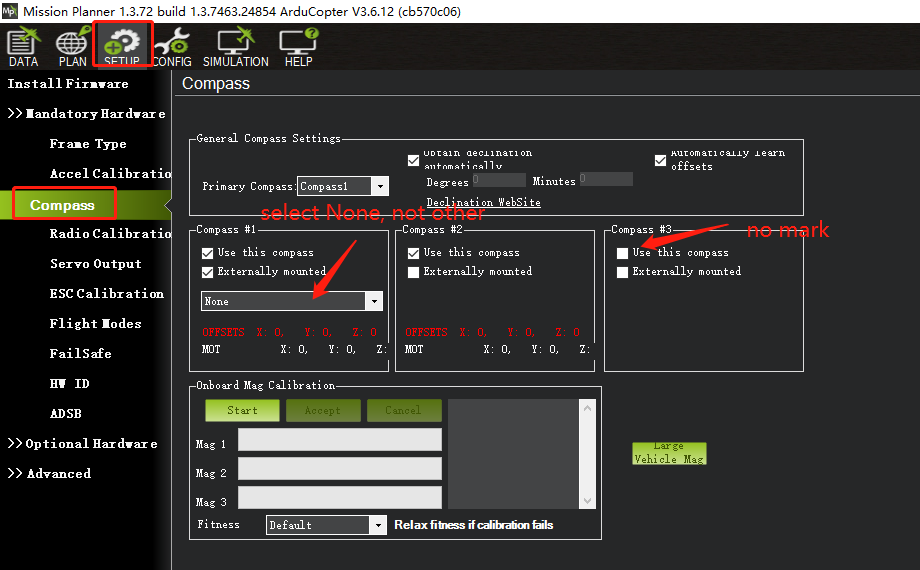
Please make sure to select the correct parameters, Compass#1 is external compass of GPS.Compass#2 is internal pixhawk compass. So Compass#1 externally mounted should be select NONE. Do not mark Compass#3 “Use this compass”.
when calibrate compass of GPS and board’s internel compass, make sure the flight control PIXHAWK arrow and the GPS direction arrow remain the same. The GPS module is bound, and the flight control and GPS module must be moved at the same time.
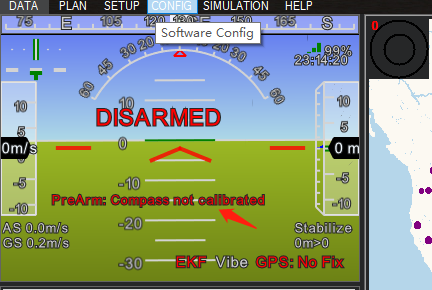
if meet this problem “compass not calibrated” after calibrate compass. It means that you select the wrong parameters .
How to fix?
Remove the mark of compass#3 “Using this compass”, because do not have compass 3.