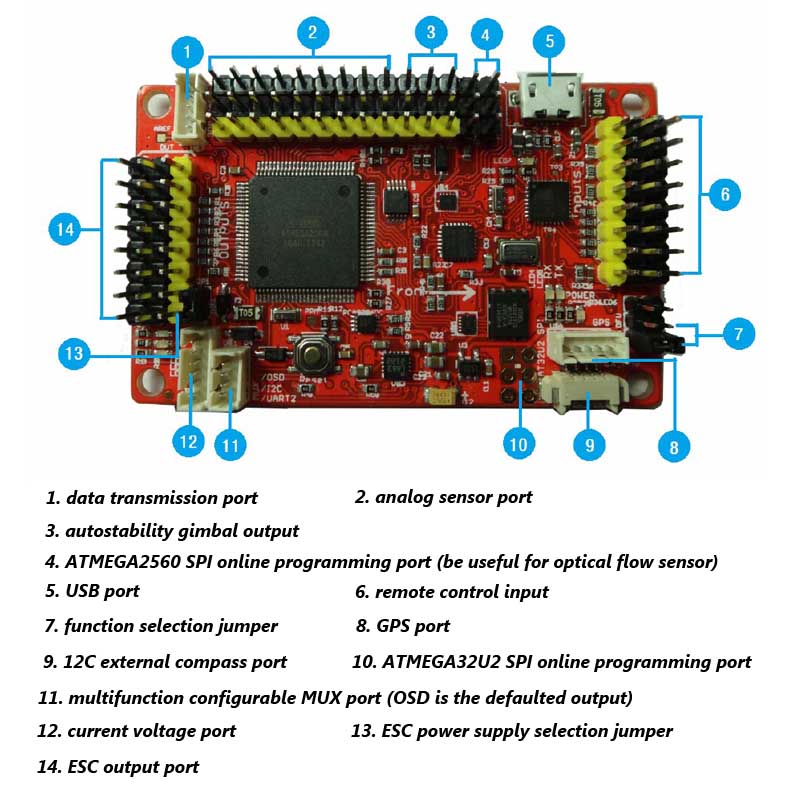
APM2.9 without internal compass,support PPM
APM2.9 is used in the same way as APM2.6, 2.8. The benefit is that APM 2.9 supports PPM receiver protocols.Why use the PPM protocol? The communication speed is fast, the wiring is simple, only one line is needed, unlike each channel of the PWM, the PWM communication speed is slower than PPM.
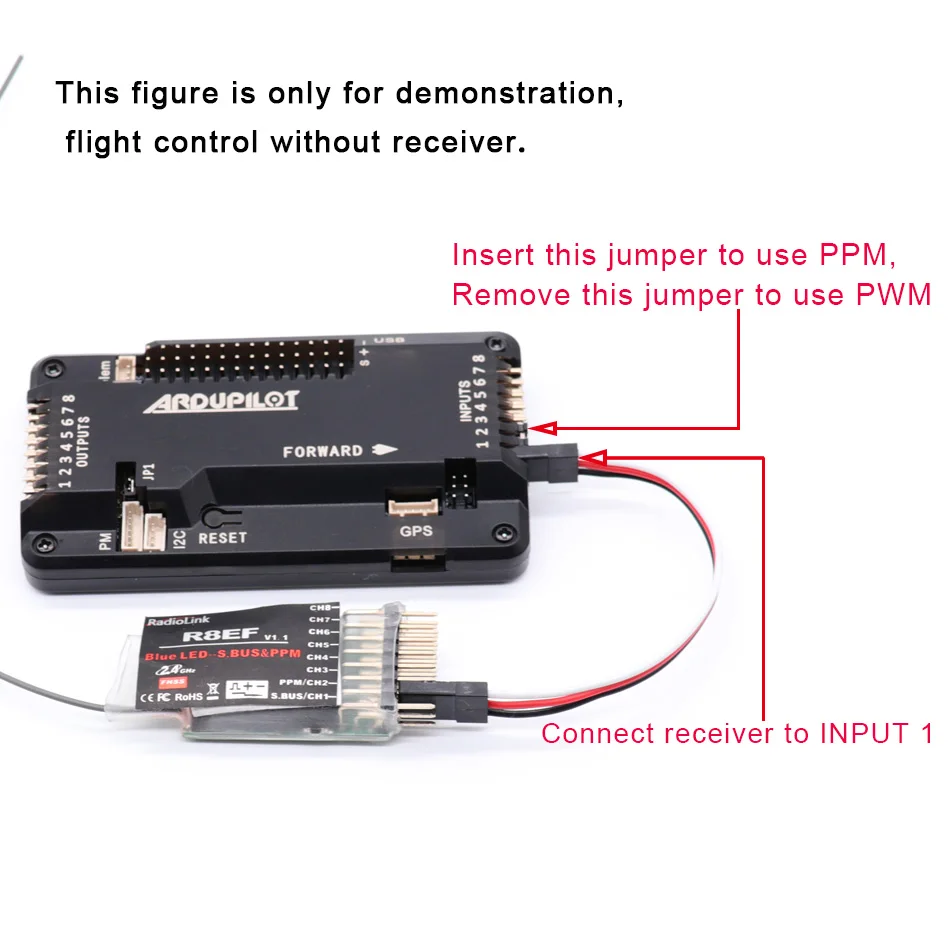
The product supports the PPM receiver protocol and supports the PWM protocol. Before using this product, make sure your receiver is PPM-enabled. If your receiver does not support PPM, use the PWM protocol.
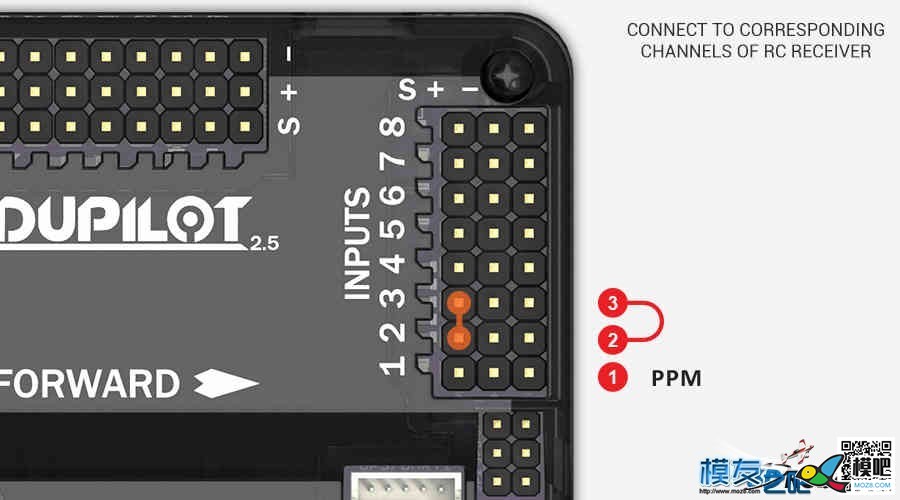
Also, you can upload firmware from Mission Planner.Uploading firmware does not affect support for PPM.When connect INPUT 2 and 3(Insert Jumper),use PPM.when Disconnect INPUT 2 and 3(Remove Jumper) ,use PWM
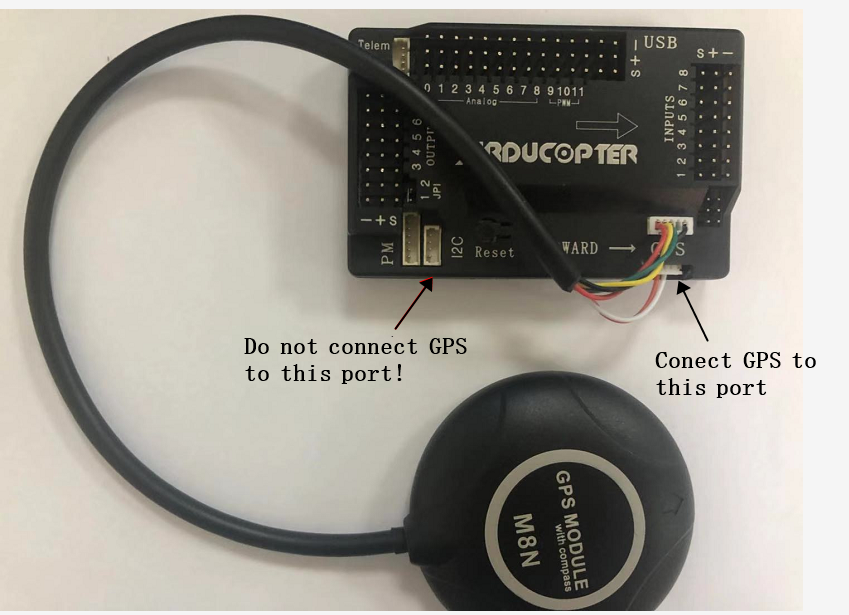
1.If want to use GPS module, the connection is as follows,
2.Use mission planner to calibrate apm. Do not recommend to use apm planner ground station. Do not recommend to use the latest version Mission Planner, because the latest version cannot be used to upload firmware online for apm, now it is used for pixhawk flight controller.
Download Mission Planner from here, https://firmware.ardupilot.org/Tools/MissionPlanner/
Now the latest Mission planner 1.3.76 has bug ,it can not calibrate Accel for APM,Waiting for the official fix of this bug, please use version 1.3.74.
if you can not calibrate Accel using the latest Mission planner, please download the 1.3.74. Download from here.
https://firmware.ap.ardupilot.org/Tools/MissionPlanner/archive/MissionPlanner-1.3.74.msi
3. Do not upload latest firmware offline to apm board.
Due to the limited memory space of the APM board, the latest firmware cannot be uploaded. If you use the mission planner to flash online, it will automatically help you to upload the firmware suitable for the APM board.For example, the copter firmware for apm is 3.2.1 (mission planner will help you upload this version),the latest version is for PIXHAWK , if you upload offline above 3.2.1, it will clear the bootloader of chip, then you cannot use apm.
So, upload firmware online at mission planner, if you upload offline, make sure the version is not above 3.2.1(copter, for example)